SLAM and Nav2 for Custom Robots in ROS2
Continuing from my last two articles where I made the custom robot models and added different plugins for differential drive, camera and lidar, we will now shift our focus to implementing NAV2 stack and make a map using SLAM toolbox in this article.
Prerequisites
Before starting, ensure you have:
- ROS2 Humble installed
- Your custom robot URDF and Gazebo simulation ready
- Basic understanding of ROS2 launch files and packages
Step 1: Install Required Packages
First, install the necessary navigation and SLAM packages:
sudo apt install ros-humble-navigation2 ros-humble-nav2-bringup
sudo apt install ros-humble-slam-toolbox
Step 2: Prepare Your Workspace
Ensure you have a ROS2 workspace with your robot description package. We’ll assume the package is named diffbot_description. All packages are in this repo.
diffbot_description/
├── CMakeLists.txt
├── package.xml
├── config/
│ ├── mapper_params_online_async.yaml
│ ├── maps(all)
├── world/
│ ├── test.world(created from gazebo)
├── launch/
│ ├── display.launch.py
│ └── gazebo.launch.py
│ └── complete.launch.py
├── urdf/
│ └── diffbot.urdf
├── rviz/
│ └── diffbot2.rviz(created from rviz)Step 3: Create Gazebo World Launch File
Create a launch file to load your custom Gazebo world. Here’s a general outline:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription, ExecuteProcess
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Nodedef generate_launch_description():
def generate_launch_description():
pkg_share = get_package_share_directory('diffbot_description')
# Path to the custom world file
world_file_name = 'test.world'
world_path = os.path.join(pkg_share, 'world', world_file_name)
# Gazebo launch
gazebo = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('gazebo_ros'), 'launch', 'gazebo.launch.py')]),
launch_arguments={'world': world_path}.items(),
)
return LaunchDescription([
gazebo,
])Step 4: SLAM Toolbox Configuration
Create a configuration file mapper_params_online_async.yaml in your package's config folder:
slam_toolbox:
ros__parameters:
# Plugin params
solver_plugin: solver_plugins::CeresSolver
ceres_linear_solver: SPARSE_NORMAL_CHOLESKY
ceres_preconditioner: SCHUR_JACOBI
ceres_trust_strategy: LEVENBERG_MARQUARDT
ceres_dogleg_type: TRADITIONAL_DOGLEG
ceres_loss_function: None
# ROS Parameters
odom_frame: odom
map_frame: map
base_frame: base_link
scan_topic: /scan
mode: mapping #localization
# if you'd like to immediately start continuing a map at a given pose
# or at the dock, but they are mutually exclusive, if pose is given
# will use pose
# map_file_name: <path>/ros2_ws/src/diffbot_description/config/map
# map_start_pose: [0.0, 0.0, 0.0]
# map_start_at_dock: true
debug_logging: false
throttle_scans: 1
transform_publish_period: 0.02 #if 0 never publishes odometry
map_update_interval: 3.0
resolution: 0.05
max_laser_range: 12.0 #for rastering images
minimum_time_interval: 0.5
transform_timeout: 0.5
tf_buffer_duration: 30.
stack_size_to_use: 40000000 #// program needs a larger stack size to serialize large maps
enable_interactive_mode: true
# General Parameters
use_scan_matching: true
use_scan_barycenter: true
minimum_travel_distance: 0.5
minimum_travel_heading: 0.5
scan_buffer_size: 10
scan_buffer_maximum_scan_distance: 10.0
link_match_minimum_response_fine: 0.1
link_scan_maximum_distance: 1.5
loop_search_maximum_distance: 3.0
do_loop_closing: true
loop_match_minimum_chain_size: 10
loop_match_maximum_variance_coarse: 3.0
loop_match_minimum_response_coarse: 0.35
loop_match_minimum_response_fine: 0.45
# Correlation Parameters - Correlation Parameters
correlation_search_space_dimension: 0.5
correlation_search_space_resolution: 0.01
correlation_search_space_smear_deviation: 0.1
# Correlation Parameters - Loop Closure Parameters
loop_search_space_dimension: 8.0
loop_search_space_resolution: 0.05
loop_search_space_smear_deviation: 0.03
# Scan Matcher Parameters
distance_variance_penalty: 0.5
angle_variance_penalty: 1.0
fine_search_angle_offset: 0.00349
coarse_search_angle_offset: 0.349
coarse_angle_resolution: 0.0349
minimum_angle_penalty: 0.9
minimum_distance_penalty: 0.5
use_response_expansion: trueStep 5: SLAM Toolbox Launch File
Create a launch file for SLAM:
import os
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
pkg_share = get_package_share_directory('diffbot_description')
slam_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('slam_toolbox'), 'launch', 'online_async_launch.py')]),
launch_arguments={
'slam_params_file': os.path.join(pkg_share, 'config', 'mapper_params_online_async.yaml'),
'use_sim_time': 'true'}.items(),
)
return LaunchDescription([
slam_launch
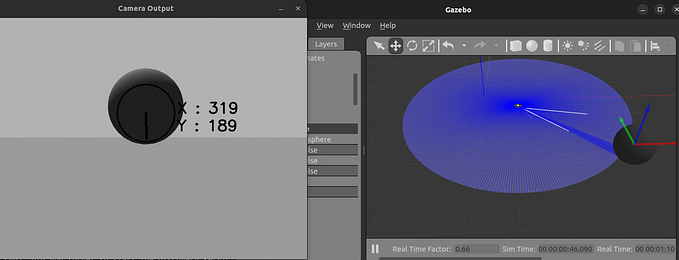
])Step 6: Mapping Your Environment
- Launch your Gazebo simulation with the robot
- Launch the SLAM toolbox
- Use teleop or your robot’s navigation to move around and create a map
- In RViz, use the “Save Map” tool to save the map files
Step 7: Localization and Navigation
After mapping, you’ll have four files in your ros2_ws folder:
map.datamap.pgmmap.posegraphmap.yaml
Move them to config folder.
Update your mapper_params_online_async.yaml:
# Uncomment these lines
map_file_name: <path>/ros2_ws/src/diffbot_description/config/map
map_start_at_dock: trueStep 8: Launch Navigation2
ros2 launch nav2_bringup navigation_launch.py use_sim_time:=trueTroubleshooting Tips
- Ensure all topic names match between URDF, Gazebo, and launch files
- Check
use_sim_timeis set totruein all nodes - Verify TF frames are correctly defined
- Adjust SLAM parameters for your specific robot and environment
Advanced Configurations
- Fine-tune SLAM parameters for better mapping
- Create multiple map configurations for different environments
- Implement dynamic obstacle avoidance in Nav2
Conclusion
You’ve now set up SLAM and Navigation2 for your custom robot in ROS2. This powerful combination allows autonomous navigation and environment mapping.
Happy robotics programming! 🤖🗺️🚀